Dronekit是一套对MAVLink的封装,简化了控制的方法,可以实现通过Python语言对无人机的控制。Dronekit不仅能直接部署在树莓派上实现对无人机的控制,也可以部署在台式机上,通过数传发送无人机的控制指令,这样就可以用台式机进行人工智能的计算,然后结果发送给无人机执行。
本文选择的是部署在树莓派上,通过树莓派直接控制飞控,实现无人机自主飞行。
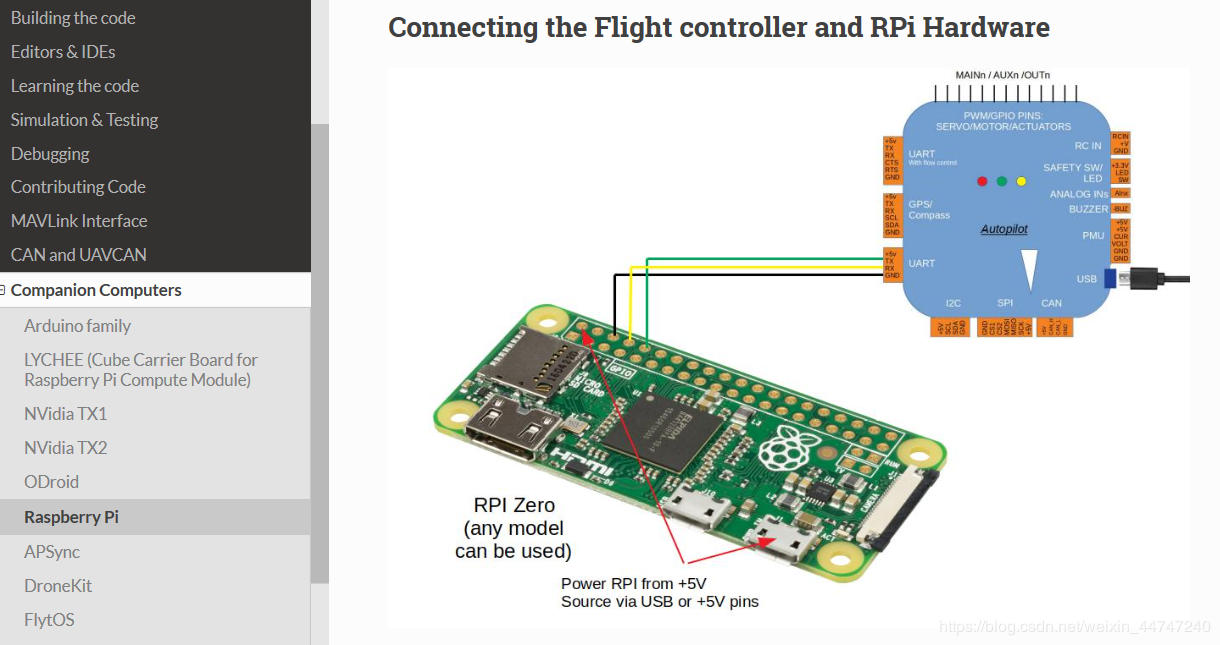
0.树莓派连接无人机
连接三个口:GND、RT、TX
1.将树莓派3B+的无线网卡设置为ap模式
这样在无人机在室外,可以通过热点登录无人机进行控制。
# 1.clone软件仓库
git clone https://github.com/oblique/create_ap
# 2.安装依赖库
sudo apt-get install util-Linux procps hostapd iproute2 iw haveged dnsmasq
# 3.编译
cd create_ap
make install
# 4.创建热点
sudo create_ap wlan0 eth0 热点名 密码
# 5.开机启动
sudo create_ap wlan0 eth0 热点名 密码 添加到/etc/rc.local当中
2.安装Dronekit套件
2.1 设置pip源
新建 ~/.config/pip.conf后写入
[global]
timeout = 60
index-url = http://pypi.douban.com/simple
trusted-host = pypi.douban.com
2.2 安装依赖
sudo apt-get install python3-pip python3-dev libxml2 libxslt-dev
pip install pyserial //python2
pip3 install pyserial //python3
pip3 install future
2.3 安装套件
pip3 install dronekit
pip3 install dronekit-sitl # 模拟器,选装,我们自己用的是Gazebo
pip3 install mavproxy # 安装mavlink的转接程序
3.测试